机器人
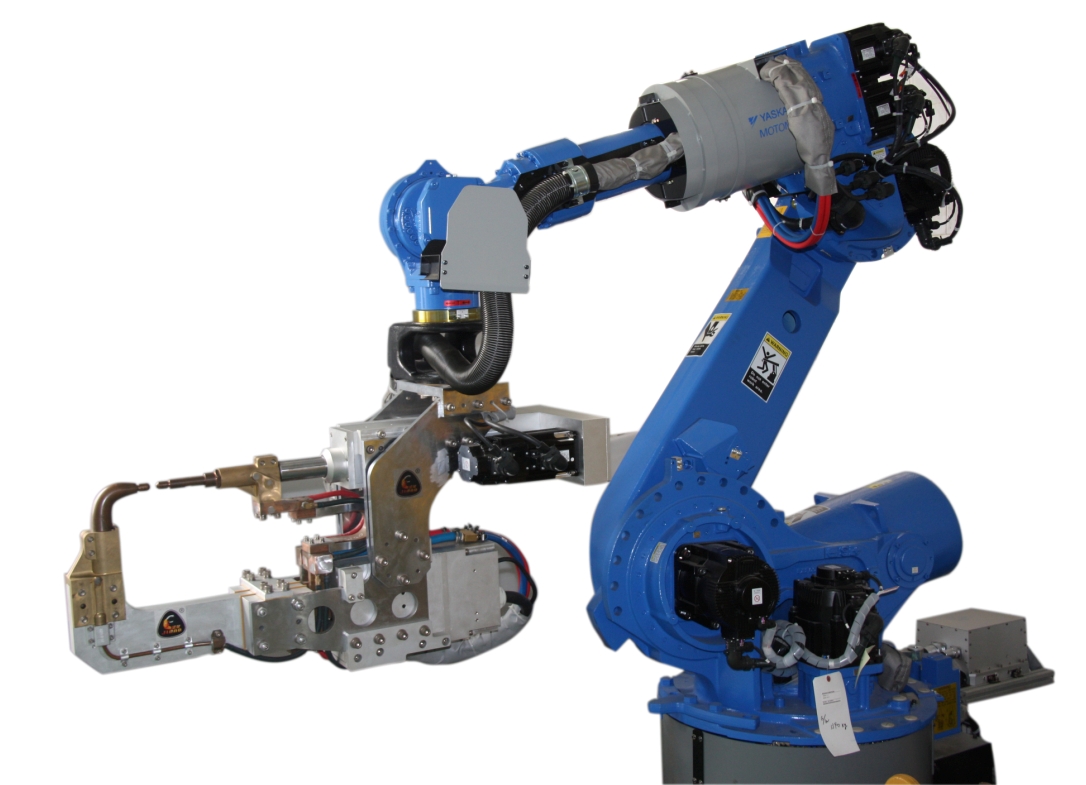
点焊机器人如何分类及各自特点
2019-11-16 15:56:27
点焊机器人可以有多种不同的分类方式,例如按照机械结构构成的不同可以分为以下几个方面。
第一种是垂直多关节型(落地式)点焊机器人。其特点是工作空间安装面积之比大,持重大多为1000N,还可附加整体移动自由度,这样就保证了点焊机器人能够到达任意一个焊接位置,对不同位置的焊点进行焊接,保证焊接精确有效,避免虚焊情况的发生,保证焊接的完整有效性。
第二种是垂直多关节型(悬挂式)点焊机器人。工作空间均安排在机器人下方,可以使焊滴自然滴落在焊接位置,在重力作用下焊点位置能够与焊接件完美结合,保证焊接件接触的充分有效,完成机械结构和电气性质的对接。
第三种是直角坐标型点焊机器人。适用于连续直线进行焊接的焊缝,大多采用3轴,4轴,5轴结构,配合方式简单易于实现,价格优廉能够充分降低成本,使企业利润提高,将资源利用在更加需要的地方,实现资源的合理有效最大化配置。
第四种是定位焊接用机器人(单向加压)点焊机器人。定位焊接点焊机器人本身带有加压作业的功能,能够很轻松承受500Kg的加压反力,是一种高刚度的机器人,在一些生产线速度较高机械强度比较大的器件加工场合可以大显身手,因为其他种类的焊接形式承受不了这么强的压力冲击,这时候高刚度机器人的优越性就体现出来了。
点焊机器人自从20世纪七十年代问世以来,在好几代人的艰辛刻苦的努力下,得到了充分有效的发展,并且在越来越多的领域得到了广泛深入的应用,虽然仍然存在不足之处,但这正是我们这代人应当为之努力的地方,发挥个人以及团体的聪明才智,努力提高焊接技术的水平,推动焊接技术的发展。